
Congratulations to Prashant Rao from the ReNeu Lab, Gray Thomas from the Human Centered Robotics Lab, and ReNeu’s Lab PI Ashish Deshpande, for winning the IEEE ICRA 2017 Best Robotic Manipulation Paper Award!



Congratulations to Prashant Rao from the ReNeu Lab, Gray Thomas from the Human Centered Robotics Lab, and ReNeu’s Lab PI Ashish Deshpande, for winning the IEEE ICRA 2017 Best Robotic Manipulation Paper Award!
Gray, Donghyun and Luis had a blast talking about our new lab’s pet topic “Uncertainty in Human-Centered Robots” #icra2017 #singapore #marinabaysands
Abstract: Uncertainty permeates in all control approaches and significantly complicates controller design. This is specially true for human-centered robots which rely on oversimplications such as ignoring high-frequency behaviors or realtime delays to central computers. In this talk Luis will join forces with HCRL students Gray and Donghyun to present detailed mathematical work on choosing structure for measuring uncertainty in a meaningful statistical sense, motivate the nature of uncertainty in hardware systems involving high performance series elastic actuators, and devise a planning and control framework that embraces uncertainty to external disturbances via reinforcement learning of locomotion responses.
Title: A Developer’s Primer for Coding Human Behavior in Bots
Abstract: This session demonstrated ways to model human-robot interaction (HRI) using a practical coding scenario. We explored how to program a humanoid robot head that manages its eye contact to maximize “connection” and minimize “social awkwardness” in human interaction. This session addressed practical computational questions and frame cognitive modeling problems based on intuitive mechanical analogies. We leveraged the power of feedback Whole-Body Control to generate useful behaviors – and demonstrated the results on the Dreamer Humanoid robot head!
Participants: Steven Jorgensen, Travis Llado, Orion Campbell, Luis Sentis
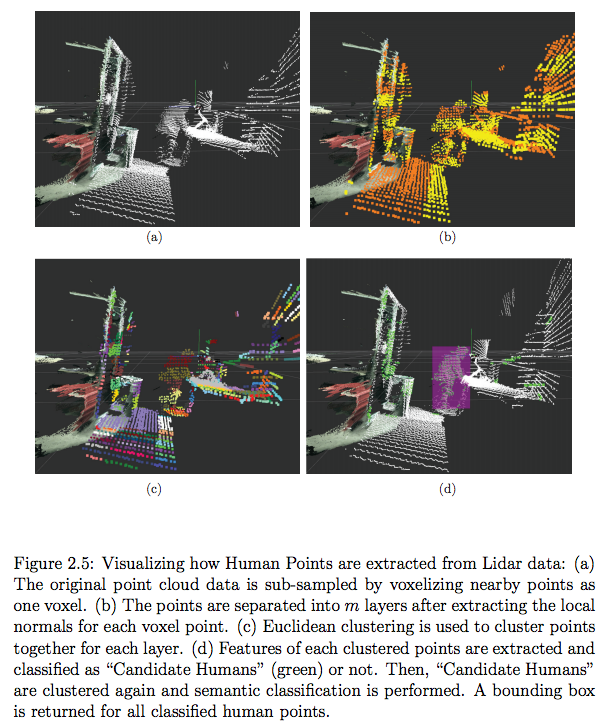
We are very pleased to have the MS Thesis on Human Detection, Gesture Recognition, and Policy Generation for Human-Aware Robots, completed from our own Steven Jorgensen. Congratulations!
Social Widgets powered by AB-WebLog.com.




