SL(2,R) Action Viewer
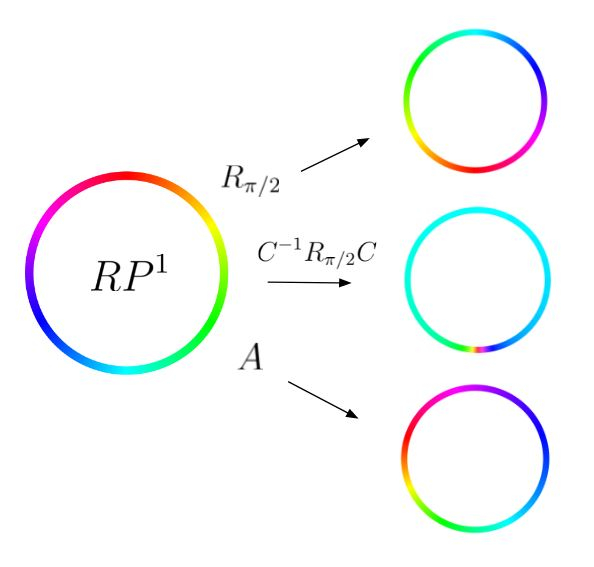
Tool designed to help visualize the action of matrices on RP1. A is a matrix in the representation of a Triangle Group.
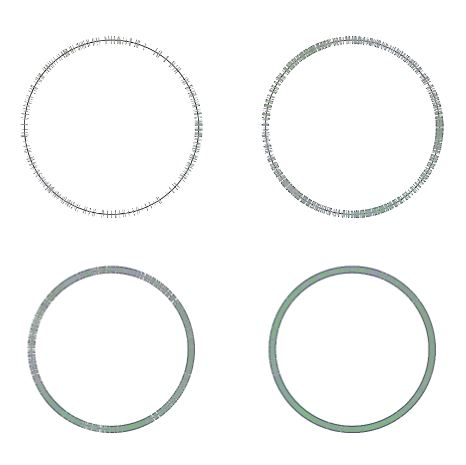
Searching for Intervals (Linear Expansion)

Intervals for the (3,3,4)-Triangle Group
Searching for Intervals (Image Patching)