
Satellite Evaluation of Relative Pose Estimation of a Non-cooperative Target
SERPENT is a mission that is a part of the University Nanosatellite Program that intends to enable new capabilities to improve space situational awareness (SSA) and autonomous inspection of uncooperative targets. The TSL, along with UT Aerospace Engineering and Engineering Mechanics professors Dr. Brandon Jones and Dr. Maruthi Akella serving as Principal Investigators, proposes to develop an autonomous pose estimation and prediction algorithm through the use of convolutional neural networks and computer vision.
The mission objectives are as follows:
- Estimate the relative pose of a non-cooperative target with a single imaging sensor to improve space situational awareness and spacecraft autonomy.
- Enable fully autonomous Rendezvous and Proximity Operations (RPO) and inspection of spacecraft by performing real-time pose estimation within the CubeSat form factor.
Mission Relevance: Autonomous Visual Inspection
With the rising concern related to the increasing orbital debris crisis, it is crucial to increase space situational awareness to protect space assets. The goal of SERPENT is to enable any spacecraft to include a cost-effective smart sensor that could provide the capability of inspecting damaged space assets and proximity operations. The Telkom-1 breakup an example of a situation in which this technology would have been beneficial, as the only way to gather information about its state is through telescopes from the ground. There are more examples like AMC-9 where the cause of break-up is still unknown.
.
.
.
.
Primary Experiment: Pose Estimation of Passive Target

Rendered Earth Image (Credit: TSL) 
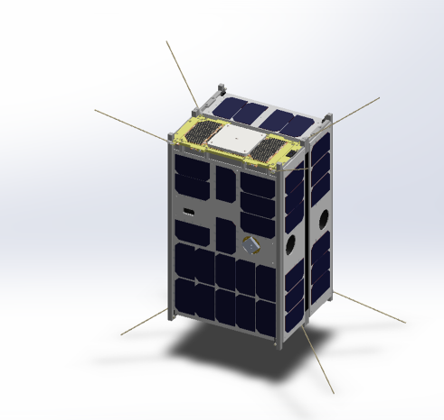
SERPENT PDR-Delta CAD w/o Solar Panels (Credit: TSL) 
Analogous Separation Mechanism Test (Credit: TSL) 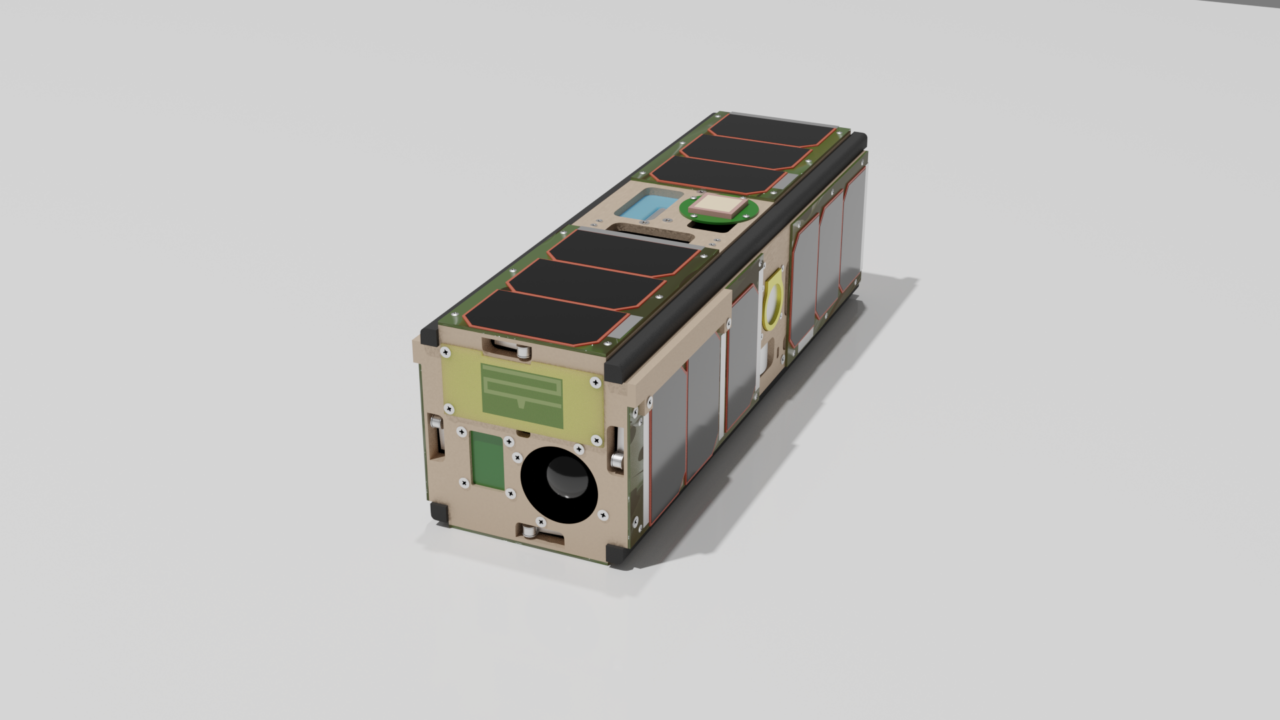
Example Bevo-2 Spacecraft Render (Credit: TSL)
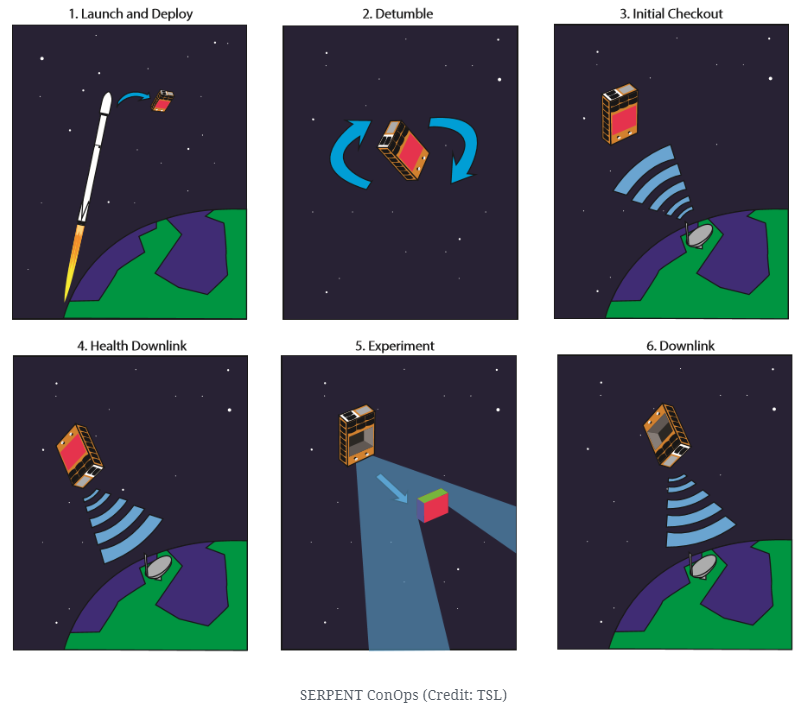
The mission will consist of a singular 6U CubeSat in Low Earth Orbit. During the experiment time, the spacecraft will deploy a passive target and attempt to estimate its pose by taking pictures to be passed to a GPU implementing a pre-trained neural network, which will identify the target in the frame of the image. These images shall then be passed to a pose estimation algorithm. These estimates, in combination with a truth estimate of the target state obtained by SERPENT, shall be transmitted back to the ground station after the completion of the experiment.
..
.







.
.
Secondary Experiment: Jetson TX2i Performance in LEO

Jetson TX2i (Credit: Nvidia)
Once the primary experiment is complete, the TX2i will be used for a long term survivability experiment in the LEO environment. The increasing interest in using GPUs over FPGAs for computationally intensive graphics related payloads has lead to the widespread adoption of the Jetson line of products from Nvidia. The TX1, TX2, and TX2i have had terrestrial radiation test campaigns orchestrated by NASA and other private companies. With the inclusion of a TX2i on the SERPENT spacecraft bus, and the extending life-cycle for down-linking the photos taken, there is ample time to observe the TX2i’s reaction to single event upsets (SEU) and its effect on system benchmark performance.
.
.
SERPENT Subsystems

STR: Structures
The structures subsystem is responsible for all SERPENT mechanical components, both in space and on the ground. Responsible for flight configuration, FlatSat, and ground support equipment 3D design, as well as structural analysis, thermal analysis, venting analysis, vibration analysis, mass budget, and thermal budget. Alongside the physical 3D design of the flight model, STR is responsible for the FlatSat layout, ground support equipment design, and various physical analyses and budget creation.

DSC: Data Science
The data science subsystem is responsible for development and testing of SERPENT payload software, including development of machine learning models, implementing computer vision algorithms, integrating and testing software on mission hardware, managing data sets, and developing renders of spacecraft for training.

SYS: Systems
The systems subsystem is responsible for ensuring that SERPENT development meets contract and Primary Investigator (PI) requirements. Tasks include managing external communications, risk, requirements, schedule, budget, interface control, and mission architecture. The Project Manager and Chief Engineer fall under the systems subsystem.

PAY: Payload
The payload subsystem is responsible for development and selection of SERPENT payload hardware. Ensuring that the other subsystems have the hardware needed to meet the mission’s science objectives is integral, as well as testing and handling hardware as it comes in through a series of Verification, Test Procedure, and Results (VTPR) documents.

FDS: Flight Dynamics
The flight dynamics subsystem is responsible for SERPENT pointing and positioning, critical to spacecraft health and mission success. Ensuring this success requires Attitude Determination and Control System (ADCS) hardware selection, GPS selection, ADCS simulation, orbit selection, de-orbit simulation, pointing budget, hardware testing and VTPRs, and target separation simulation.

EPS: Electrical Power System
The electrical power system subsystem is responsible for SERPENT power systems and electronics. Some of their responsibilities include custom PCB development, solar panel design, battery sizing, hardware selection, and power and energy budget creation. Ensuring all selected hardware is appropriately supported in a failsafe way is critical.

COM: Communications
The communications subsystem is responsible for ensuring that the TSL is able to uplink commands and downlink data to the SERPENT spacecraft. Other duties include creation of the link budget and data budget, radio and antenna selection, satellite flight software, ground control software, as well as ground station design.

FSW: Flight Software
The flight software subsystem is responsible for SERPENT software development, specifically related to low-level satellite flight and health. Building this software base for the satellite includes developing software architecture, satellite computer selection, and performing system testing.
Previous Architecture
SERPENT went through a large architecture shift from the original double satellite configuration. From SERPENT’s conception through PDR in December 2019, the mission consisted of two satellites, CORAL and KING, that would take images of each other in cooperative and non-cooperative situations, and communicate their true pose data to each other through wifi, to be downlinked to the ground station. However, the nature of two satellites introduced extreme complexity and cost issues, and changes were made at PDR-Delta to reduce the scope of the experiment to have less risk.
