Seeker is a NASA Johnson Space Center (JSC) program that hopes to demonstrate the core capabilities required for safe external robotic free-flyer inspection of crewed space vehicles. External inspection of crewed space vehicles is a crucial next-step in manned space exploration that will greatly improve astronaut safety and provide unparalleled ability to recover from in-flight anomalies and avoid loss of crew. Apollo 13 and the Columbia disaster are two such examples which would have benefited from the technology that Seeker aims to develop.
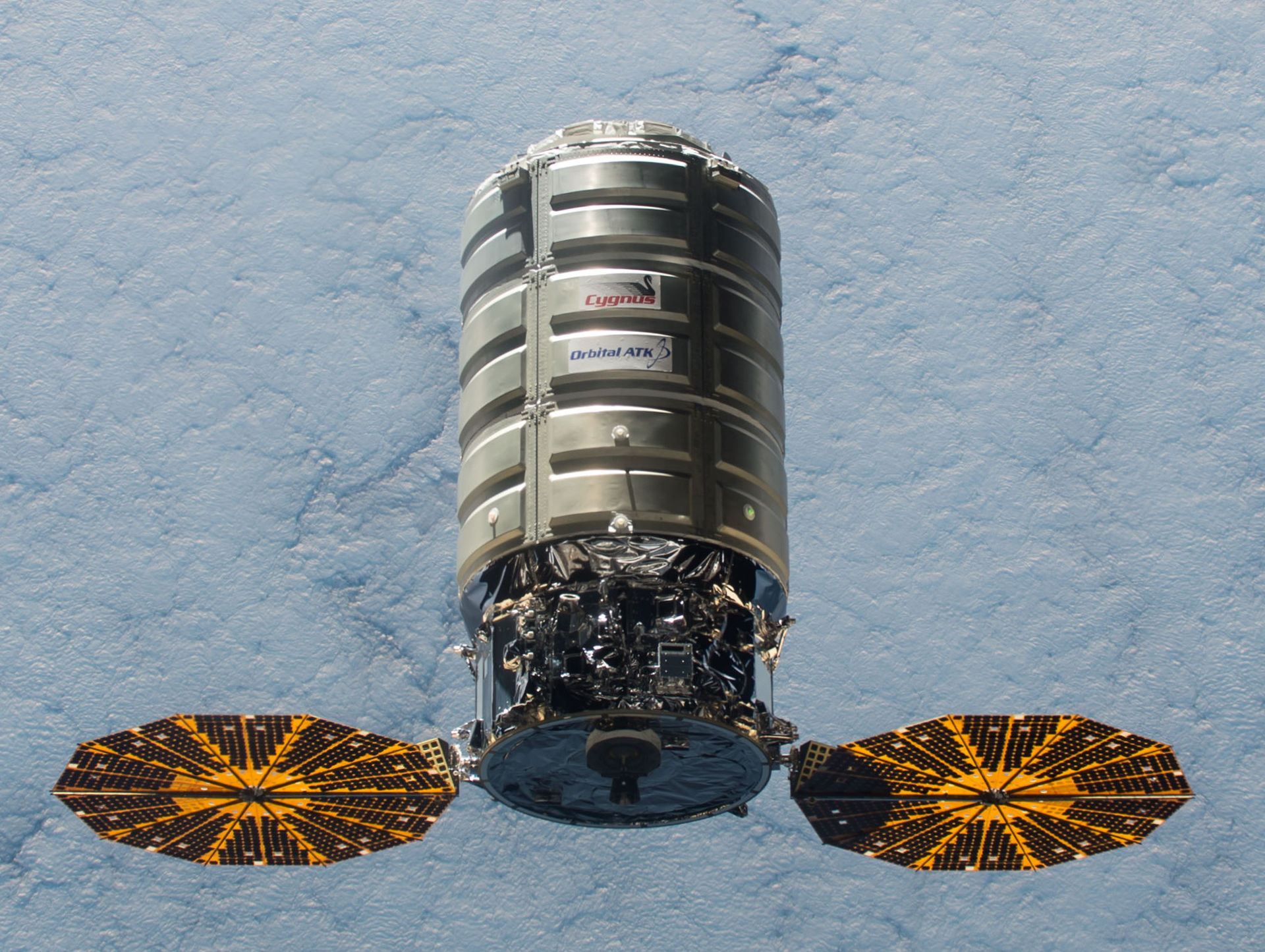
The Texas Spacecraft Laboratory (TSL), with UT Aerospace Engineering and Engineering Mechanics professor Dr. Maruthi Akella serving as Principal Investigator, was originally funded to develop a vision system for the Seeker-1 technology demonstration mission launching in April 2019. Seeker-1 is a 3U CubeSat that will be deployed from an Orbital ATK Enhanced Cygnus ISS resupply spacecraft following the completion of its resupply mission. The Seeker-1 CubeSat will perform a 60-minute mission consisting of proximity operations around the Cygnus spacecraft. The UT-developed vision system was to be isolated from all other sensors onboard the spacecraft, using only a commercially available camera and state-of-the-art computer vision algorithms to detect the Cygnus spacecraft (or its lack thereof) and compute its relative bearing in a variety of lighting conditions, orientations, and background environments. The measurements taken by the intelligent camera system are then used in real-time in the guidance, navigation, and control of the Seeker-1 CubeSat.

In May 2018, the TSL delivered a vision system to JSC capable of computing relative azimuth and elevation at a solution rate of 2 Hz. In August 2018, this vision system was selected for flight over competing systems after testing proved it to be the most robust solution available. It was integrated into the final Seeker-1 CubeSat and was set to be used in the navigation system during the 60-minute mission in September 2019.
Thanks to the success of the delivered system, JSC chose to fund continued research in order to develop a second-generation system capable of computing relative pose as an extension of the current relative bearing capabilities. In addition, research was begun on the feasibility of using LiDAR in addition to or in place of a camera for computing the same properties. This research was funded through September of 2019.
Seeker was deployed in September 2019, and collected over 100 images of the Cygnus spacecraft. These images are currently being processed by the TSL in preparation for a future presentation to NASA JSC. The images are available for public view and release here.