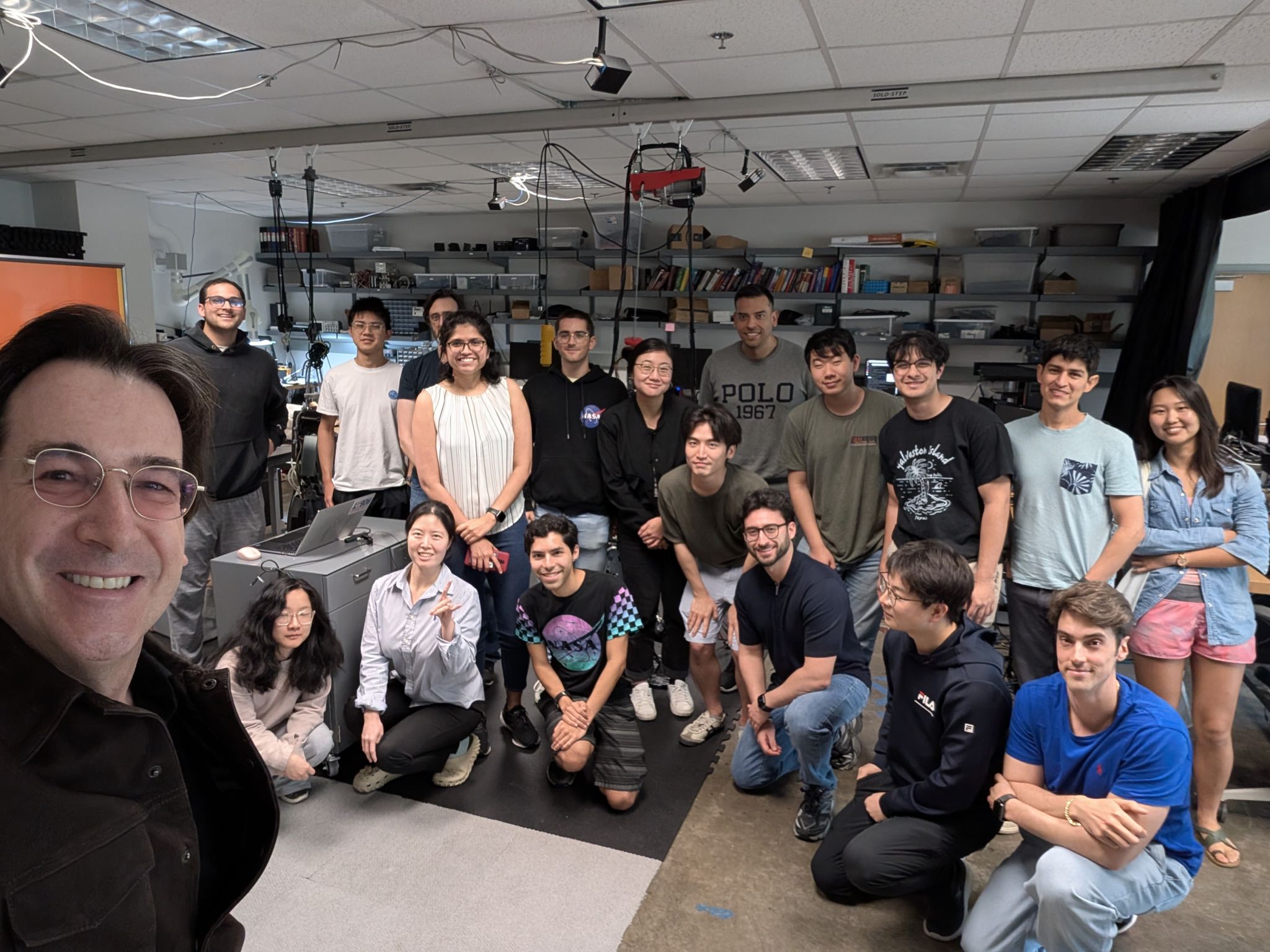
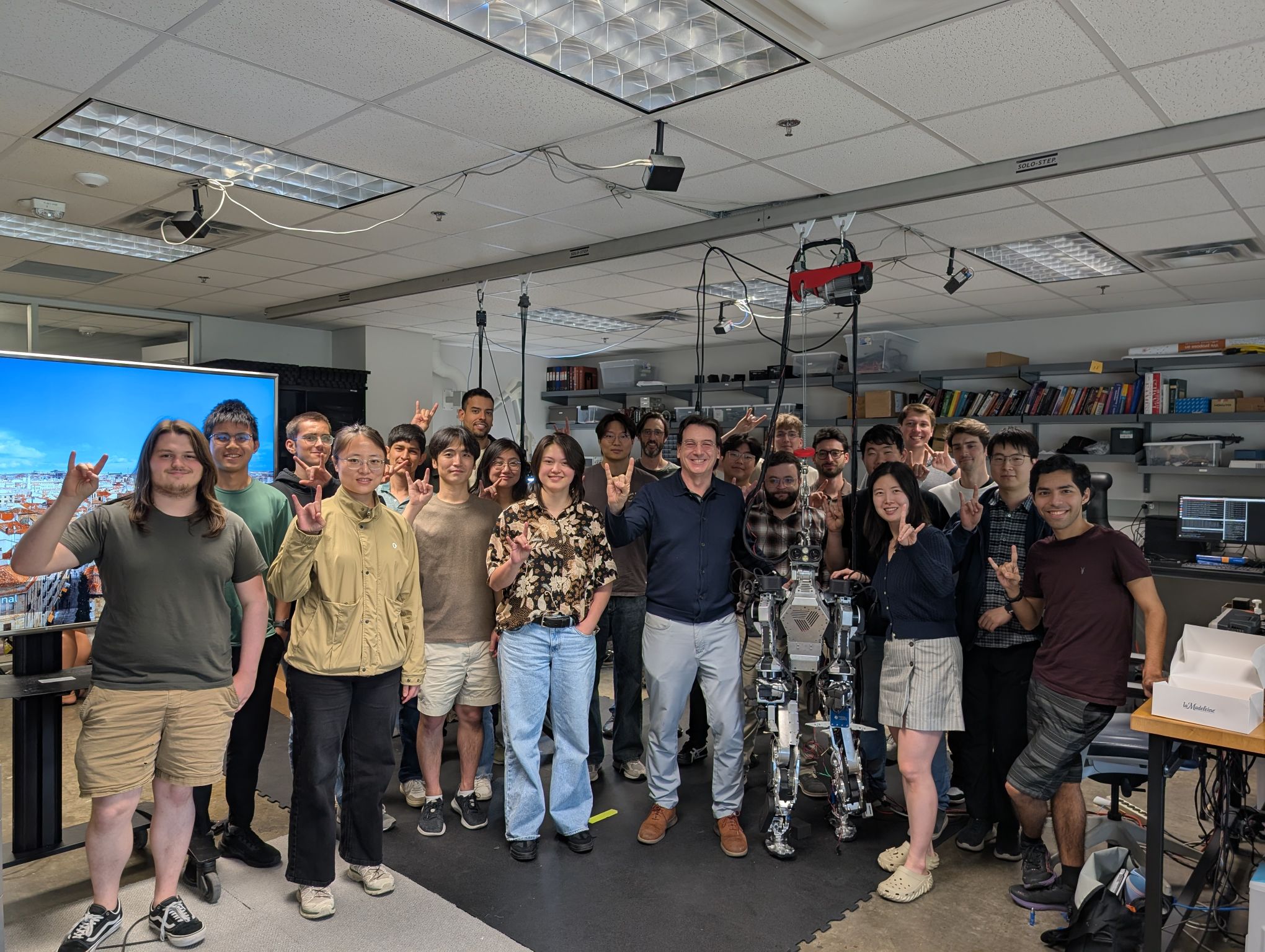
Huge congrats to Heeyong Huh on a fantastic defense! We had a packed house today to celebrate the 17th PhD to graduate from the lab. So proud of his hard work!




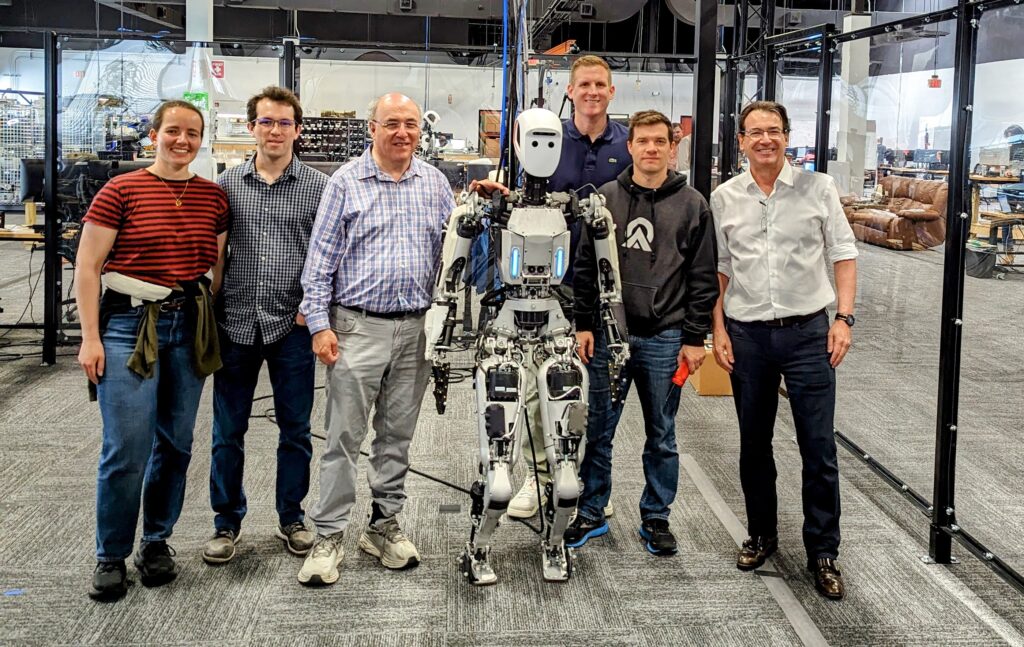
We are thrilled to celebrate Apptronik’s recent raise, announced at the New York Stock Exchange. Spanning off from our laboratory and co-founded with our lab’s former student, CTO Nick Paine, this journey proves that academic research can solve massive real-world challenges. Our mission remains empowering our students to dream big, creating high-tech jobs in Austin, and ensuring Texas leads the way in humanoid robotics to change the world.

We usually take fingernails for granted, but they’re vital for fine-motor control and feeling textures. Our students have been doing some great work looking into the mechanics behind this.
arXiv: https://lnkd.in/gkC8f5nF
Website: https://lnkd.in/gAkCPmqd
Huge shout-out to our UT Austin students, engineers, and faculty from ASE and JSG who participated in this event! We recently took part in the XPRIZE Wildfire World-Wide Competition, making up one of 13 teams globally. We were led by our own faculty: Profs. Luis Sentis, Greg Zwernemann, and James Thomson, and we had some brilliant international collaboration from U. Southampton’s Profs. Mohammad Soorati and Klaus-Peter Zauner. A huge thank you to our sponsors AIVE AI Systems, Leo Lion of UK, and the Sentis-Ben-Yakar Family!
Congratulations to the HCRL students for their PhD’s

Apptronik, a spin-off from the HCRL, co-founded by former student Nick Paine and PI Luis Sentis, secures $350M to advance Humanoid Robots. A great example of how “What Starts Here, Changes the World!” Click here or on on the image to read the full news article.