This video shows our human-size bipedal robot, Mercury, which has passive ankles, thus relying solely on hip and knee actuation for balance. This capability is not only very difficult to accomplish but enables the robot to rapidly respond to disturbances like those produced when walking around humans.
New Paper Accepted on IEEE Transactions on Automatic Control
New Paper Accepted on IEEE Transactions on Mechatronics

HCRL’s Next Robotic Cohort

Students and PI Interview for KVUE
IEEE IROS Papers Accepted
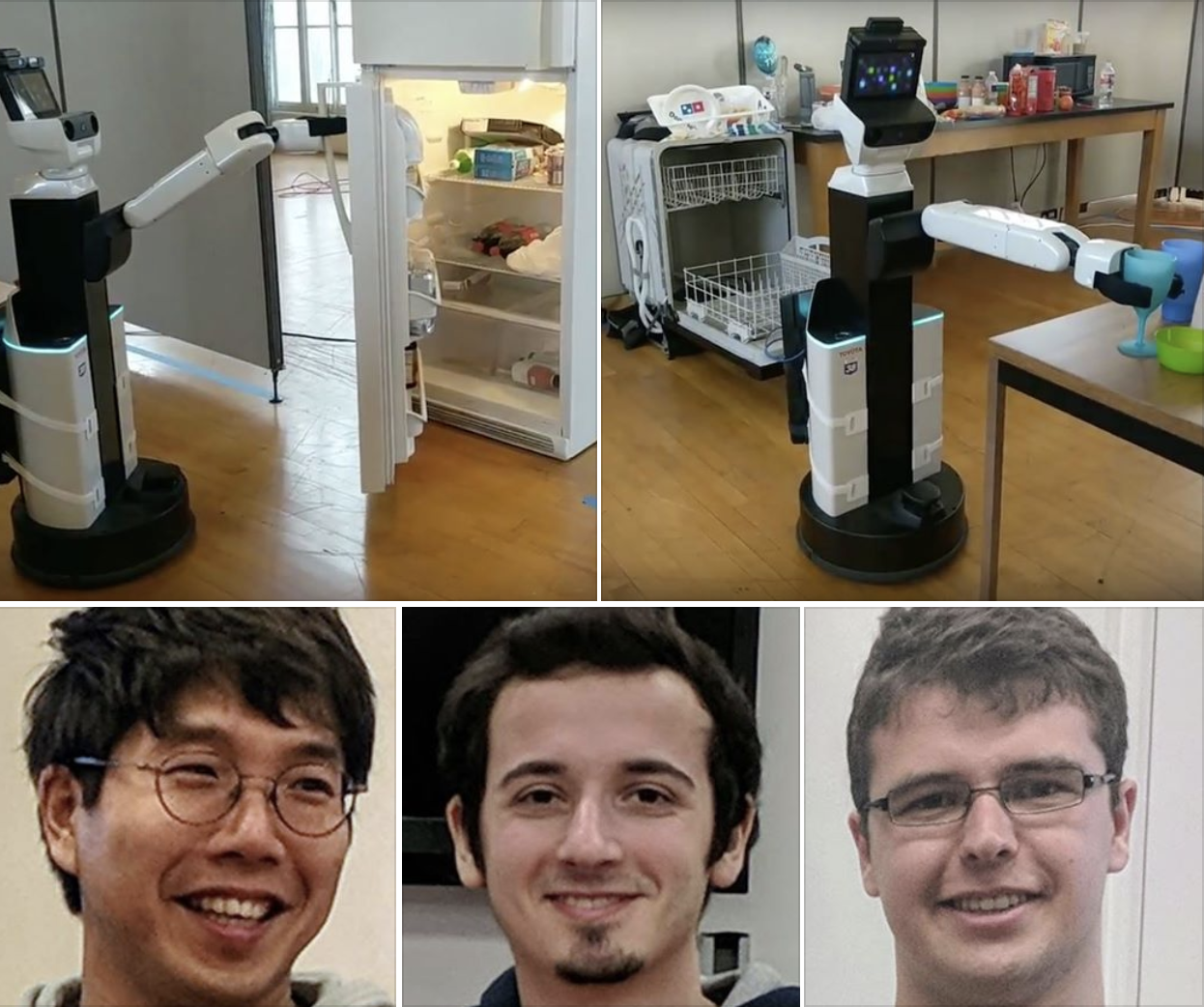
Congratulations to Donghyun, Junhyeok, Jaemin, Orion, and Hochul for their accepted papers:
- D. Kim, J. Lee, O. Campbell, H. Hwang, L. Sentis, Computationally-Robust and Efficient Prioritized Whole-Body Controller with Contact Constraints (arXiv preprint), IEEE International Conference on Intelligent Robots and Systems (IROS 2018), October 2018
- J. Ahn, O. Campbell IV, D. Kim, L, Sentis, Fast Kinodynamic Bipedal Locomotion Planning with Moving Obstacle, IEEE International Conference on Intelligent Robots and Systems (IROS 2018), October 2018
Video for the first paper is below: