

We have accomplished strength amplification using Apptronik’s SAGIT exoskeleton reducing significantly the effort of operators carrying payloads and performing repetitive movements.
Draco 3 Humanoid Power Up
Dr. Sentis Attends Tesla AI Day in Silicon Valley


Presentation and Link to Paper on Nested Mixture of Experts
Here, Junhyeok describes our work on training nested mixture of expert mdoels for data-efficient model-based reinforcement learning. In particular, we focus on learning mixture of expert representations of hybrid dynamical systems that engage in intermittent contacts, such as legged robots. You can access the paper by using the URL below:
http://proceedings.mlr.press/v144/ahn21a/ahn21a.pdf
New paper on Versatile Legged Manipulation
Congratulations to Junhyeok, Steven and Seung-Hyeon for getting this paper accepted in Frontiers in Robotics and AI, exploring fast optimal control and motion planning to maneuver in rough terrains using humanoid robots.
Link to Paper (in Press): Click Here
Thesis Defense of Binghan He
New Paper on Trajectory Generation for Humanoid Robots

Sharing a Keynote on Robotics, Innovation, and Space
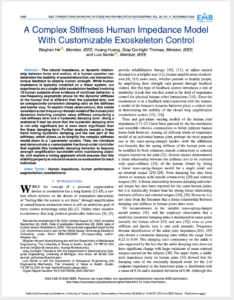
New Paper in IEEE TNSRE Journal
Congratulations to Binghan, Huang and Gray! New research suggests that “hysteretic damping” models of human neuromuscular behavior are more accurate than “mass-spring-damper” models and could improve the performance of strength amplifying exoskeletons. Click the image below to go to IEEE Transactions on Neural Systems and Rehabilitation Engineering.
Ribbon Cutting Ceremony of New Anna Hiss Robotics Building
The HCRL, along with 14 other robotics laboratories on campus participated in the ribbon cutting ceremony of our new robotics building. Among the attendees we had the governor or Texas, the secretary of the Army, the president of the university, and the deans of engineering and natural science. It was a splendid day.