
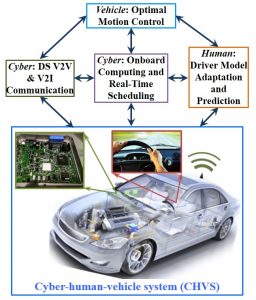
 Synopsis: This project is funded by National Science Foundation (NSF) Cyber Physical Systems (CPS) program. The goal of this project is to conduct multidisciplinary and in-depth research on cyber-human-vehicle systems (CHVS) and generate innovative methodologies that can optimally and holistically synthesize the human driving characteristics, vehicle active motion control, onboard real-time computation task-scheduling, as well as real-time vehicle-to-vehicle (V2V) communications for CHVS to substantially enhance driving safety particularly in emergency situations. Continuous curriculum development and K-12 outreach will facilitate the achievement of educational and outreach goals. Industrial collaborations will be pursued to transfer the research findings.
Synopsis: This project is funded by National Science Foundation (NSF) Cyber Physical Systems (CPS) program. The goal of this project is to conduct multidisciplinary and in-depth research on cyber-human-vehicle systems (CHVS) and generate innovative methodologies that can optimally and holistically synthesize the human driving characteristics, vehicle active motion control, onboard real-time computation task-scheduling, as well as real-time vehicle-to-vehicle (V2V) communications for CHVS to substantially enhance driving safety particularly in emergency situations. Continuous curriculum development and K-12 outreach will facilitate the achievement of educational and outreach goals. Industrial collaborations will be pursued to transfer the research findings.
Project Team: the project consists of four faculty members from three disciplines: Mechanical, Electrical, and Psychology, at UT-Austin and Ohio State University together with three or four Ph.D. students and some undergraduate researchers.
PI and co-PIs: Profs. Junmin Wang, Xiaorui Wang, Haijun Su, and Richard Jagacinski
Awards received based on this project
- 2020 Automotive and Transportation Systems Best Paper Award, ASME-DSCC, 2020.
- 2018 IEEE Andrew P. Sage Best Transactions Paper Award – IEEE Systems, Man, and Cybernetics Society, November 2018.
- Ohio State University Lumley Interdisciplinary Research Award, April 2018.
Publications from this project
- Yunhao Bai, Kuangyu Zheng, Zejiang Wang, Xiaorui Wang, and Junmin Wang, “MC-Safe: Multi-channel Real-time V2V Communication for Enhancing Driving Safety,” ACM Transactions on Cyber-Physical Systems, Vol. 4, No. 4, Article 46 (27 pages), 2020 (DOI: 10.1145/3394961).
- Zejiang Wang and Junmin Wang, “Autonomous Vehicle Trajectory Following: A Flatness Model Predictive Control Approach with Hardware-in-the-Loop Verification,” IEEE Transactions on Intelligent Transportation Systems (in press), 2020.
- Zejiang Wang and Junmin Wang, “Ultra-local Model Predictive Control: A Model-Free Approach and its Application on Automated Vehicle Trajectory Tracking,” Control Engineering Practice, Vol. 101, 104482 (14 pages) 2020.
- Yunhao Bai, Zejiang Wang, Xiaorui Wang, and Junmin Wang, “AutoE2E: End-to-End Real-time Middleware for Autonomous Driving Control,” Proceedings of the 40th IEEE International Conference on Distributed Computing Systems, July 2020 (accepted, 18% acceptance rate).
- Zejiang Wang and Junmin Wang, “Personalized Ground Vehicle Collision Avoidance System: From a Computational Resource Re-allocation Perspective,” Proceedings of the 2020 IEEE Intelligent Vehicles Symposium, June 2020 (accepted).
- Zejiang Wang and Junmin Wang, “Real-Time Driver Model Parameter Identification: An Algebraic Approach,” Proceedings of the 2020 ASME Dynamic Systems and Control Conference, Pittsburgh, USA, 2020 (accepted).
- Tyler Morrison, Emanuele Rizzi, Anil Turkkan, Richard Jagacinski, Haijun Su, and Junmin Wang, “Drivers’ Spatio-Temporal Attentional Distributions Are Influenced by Vehicle Dynamics and Displayed Point of View,” Human Factors (in press), 2019.
- Richard J. Jagacinski, Emanuele Rizzi, Benjamin J. Bloom, O. Anil Turkkan, Tyler N. Morrison, Hai-Jun Su, and Junmin Wang, “Drivers’ Attentional Instability on a Winding Roadway,” IEEE Transactions on Human-Machine Systems, Vol. 49, Issue 6, pp. 498 – 507, 2019 (DOI: 10.1109/THMS.2019.2906612).
- Zejiang Wang, Yunhao Bai, Junmin Wang, and Xiaorui Wang, “Vehicle Path Tracking LTV-MPC Controller Parameter Selection Considering CPU Computational Load,” ASME Transactions Journal of Dynamic Systems, Measurement and Control, Vol. 141, pp. 051004-1-12, May 2019.
- Scott Schnelle, Junmin Wang, Richard Jagacinski, and Hai-jun Su, “A Feedforward and Feedback Integrated Lateral and Longitudinal Driver Model for Personalized Advanced Driver Assistance Systems,” Mechatronics, Vol. 50, pp. 177-188, April 2018.
- Scott Schnelle, Junmin Wang, Haijun Su, and Richard Jagacinski, “A Personalizable Driver Steering Model Capable of Predicting Driver Behaviors in Vehicle Collision Avoidance Maneuvers,” IEEE Transactions on Human-Machine Systems, Vol. 47, Issue 5, pp. 625 – 635, Oct. 2017.
- Zejiang Wang, Jingqiang Zha, and Junmin Wang, “Flatness-based Model Predictive Control for Autonomous Vehicle Trajectory Tracking,” Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (Special Session Paper), October, 2019.
- Zejiang Wang and Junmin Wang, “Driver-Friendly Emergency Collision Avoidance System via Flatness Direct Yaw Moment Control,” Proceedings of the ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Anaheim, CA, 2019.
- Zejiang Wang, Yunhao Bai, Jingqiang Zha, Junmin Wang, Xiaorui Wang, “Cooperative Adaptive Cruise Control Safety Enhancement via Dynamic Communication Channel Selection,” Proceedings of the 2019 American Control Conference (Invited Paper), July 2019.
- Zejiang Wang, Yunhao Bai, Junmin Wang, and Xiaorui Wang, “Parameter Selection of an LTV-MPC Controller for Vehicle Path Tracking Considering CPU Computational Load,” Proceedings of the 2018 ASME Dynamic Systems and Control Conference (Invited paper), Oct. 2018.
- Yunhao Bai, Kuangyu Zheng, Zejiang Wang, Xiaorui Wang, and Junmin Wang, “Dynamic Channel Selection for Real-time Safety Message Communication in Vehicular Networks”, the 39th IEEE Real-Time Systems Symposium (RTSS 2018), Nashville, Tennessee, Dec. 2018.
Graduated students worked on this project
- Dr. Anil Turkkan, Ph.D. in Mechanical Engineering, 2017.
- Dr. Emanuele Rizzi, Ph.D. in Psychology, 2018.
- Mr. Brent Milligan, B.S. in Mechanical Engineering, 2020.