

Current Robots and Aircrafts
R1 Humanoid Robot
Arriving in January 2026
Bumpybot Safe WheelChair

AIVE / FLARE-X Scout Aircraft

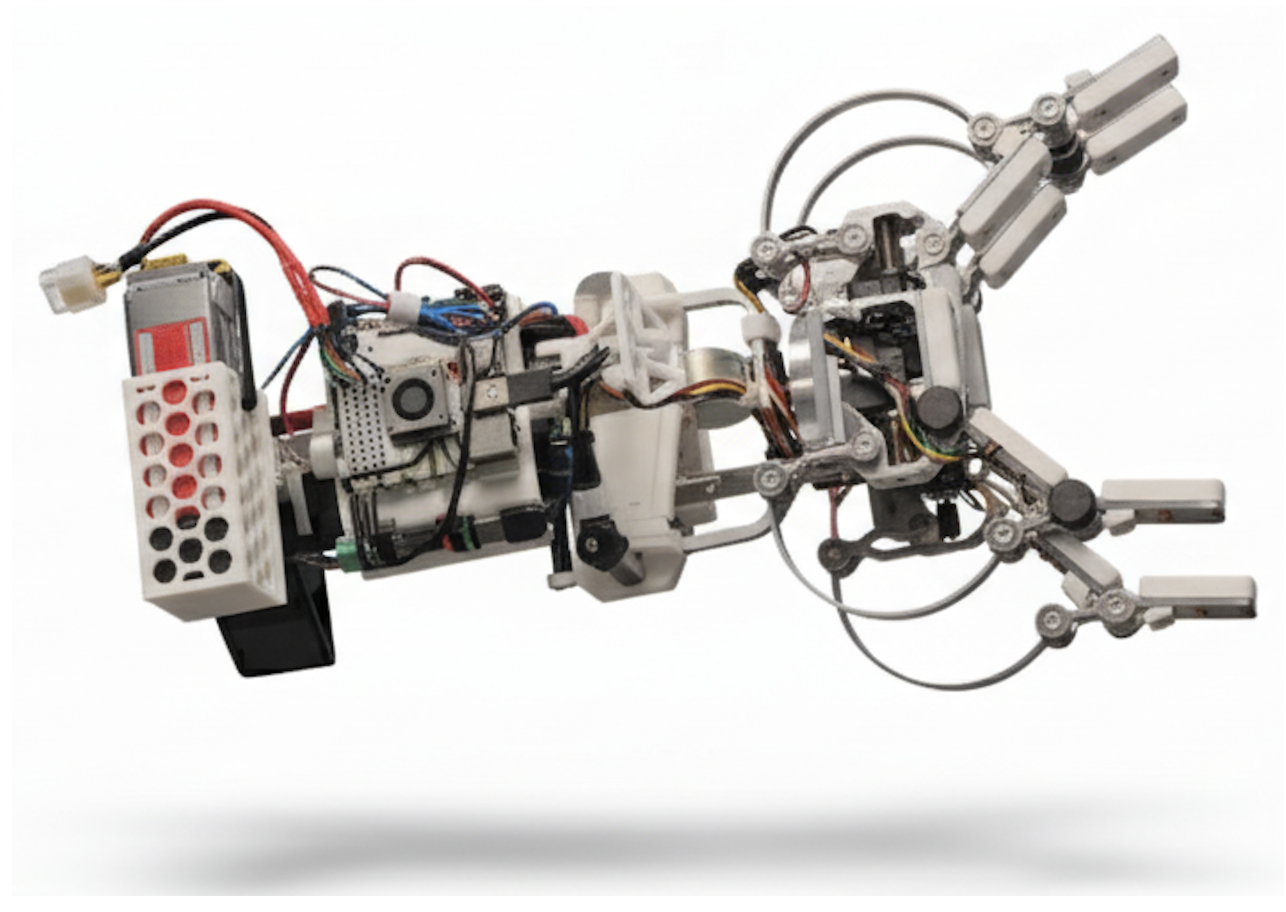
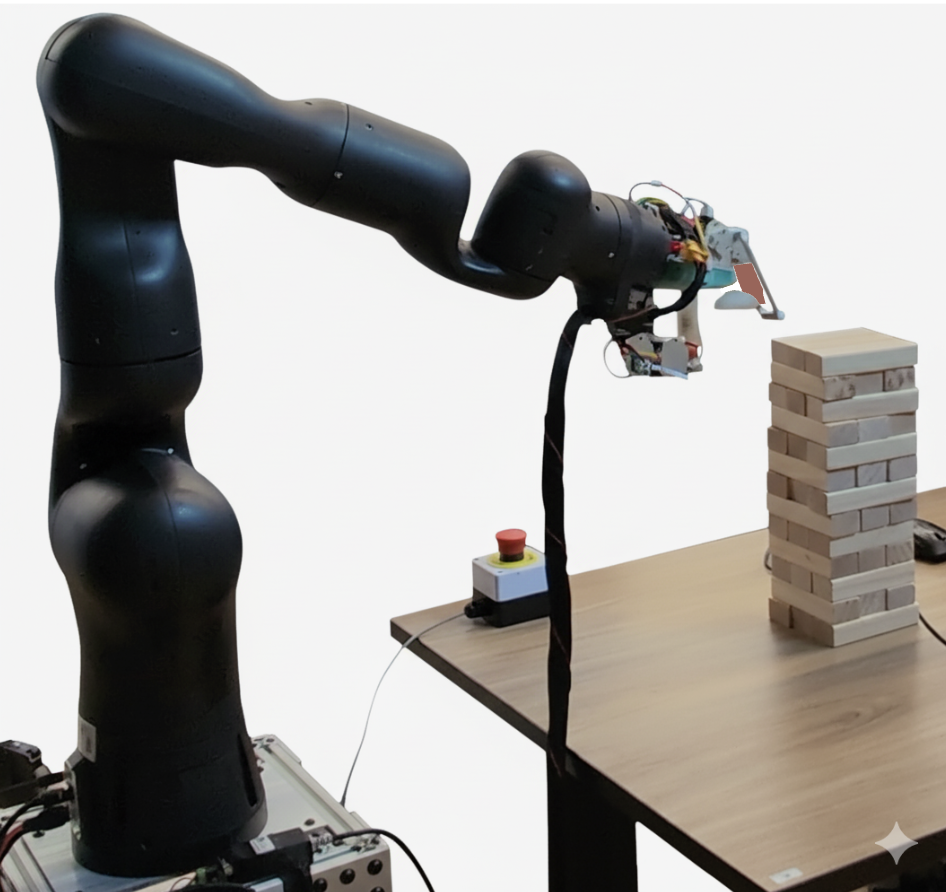
Antero Rehabilitation Learning Gripper
Roboligent Torque Control Arm
Former Robots
UT-Apptronik DRACO Humanoid Robot
Apptronik SAGIT Force Amplification Exoskeleton
SCORPIO Compliant Manipulator
DRACO 2 Line Feet Biped
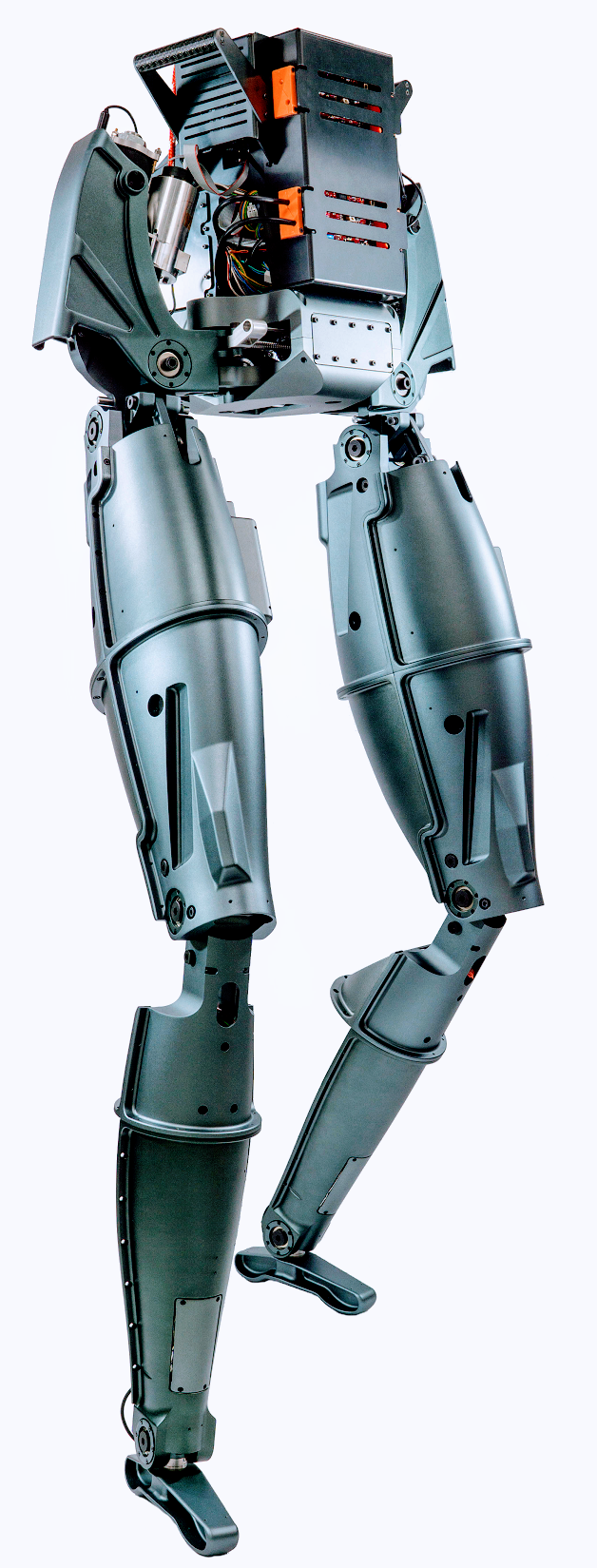
- 10 DOF Apptronik liquid-cooled viscoelastic actuators
- Apptronik Medulla / Axon embedded controllers
- Tactical IMU
- Whole-body controller
- Phase space dynamic locomotion planner
Mercury Bipedal Robot

- 6 DOF SEA actuators
- Torque sensing for all DOFs
- Apptronik Medulla / Axon embedded controllers
- Whole-body controller
- Phase space dynamic locomotion planner
Dreamer Mobile Humanoid Robot

Upper Body
-
- 7 DOF compliant arm with Series Elastic Actuation
- 3 DOF torque controlled torso
- 5 DOF compliant hand driven by tendon actuators
- Trikey compliant holonomic mobile platform
- Ethercat realtime communications
- Realtime RTAI kernel
- ControlIt! whole-body controller
Appronik P170 Actuators
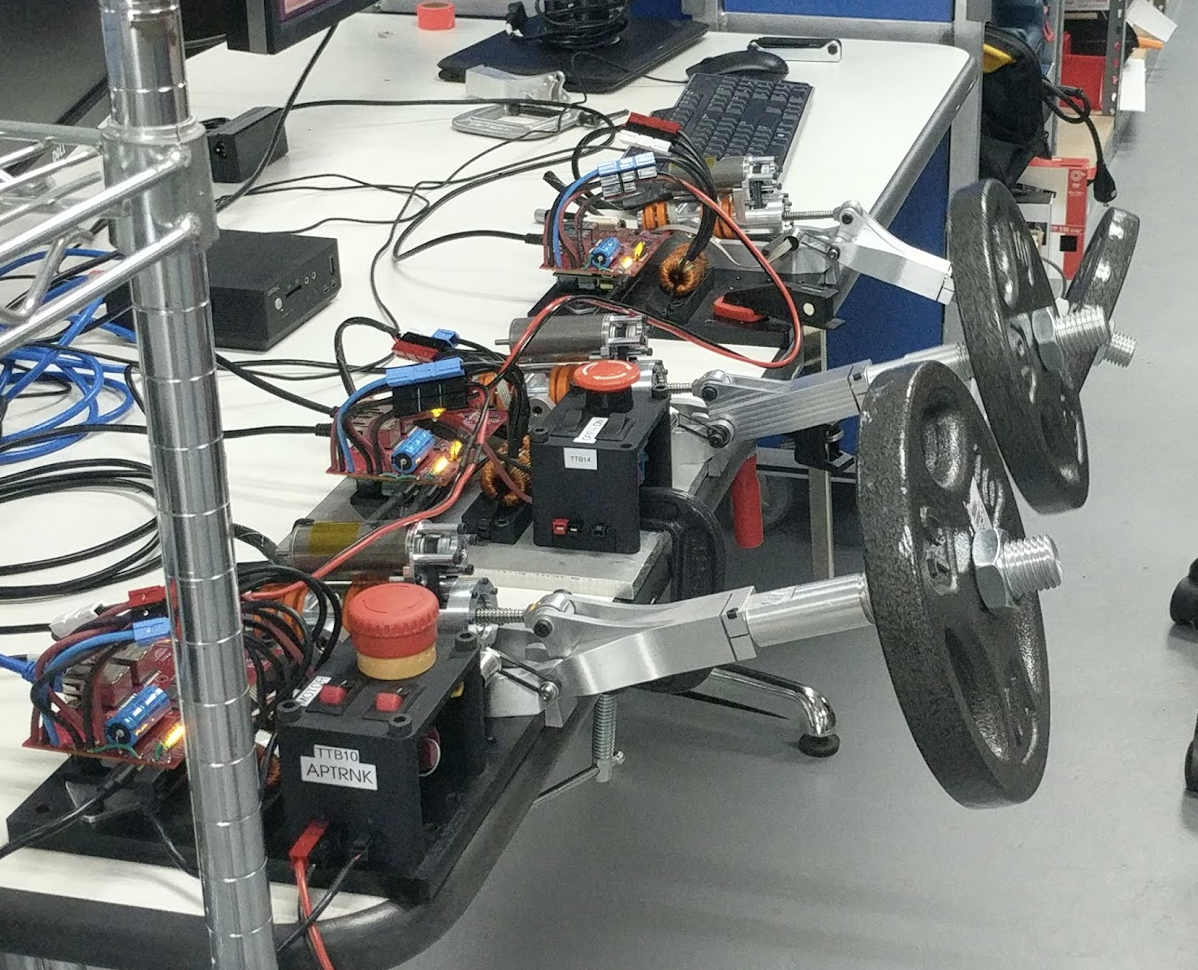
- Compact Series Elastic Actuator
- High Power and High Efficiency
- Used for studies on exoskeletons, compliant locomotion and remote training
Trikey Mobile Base
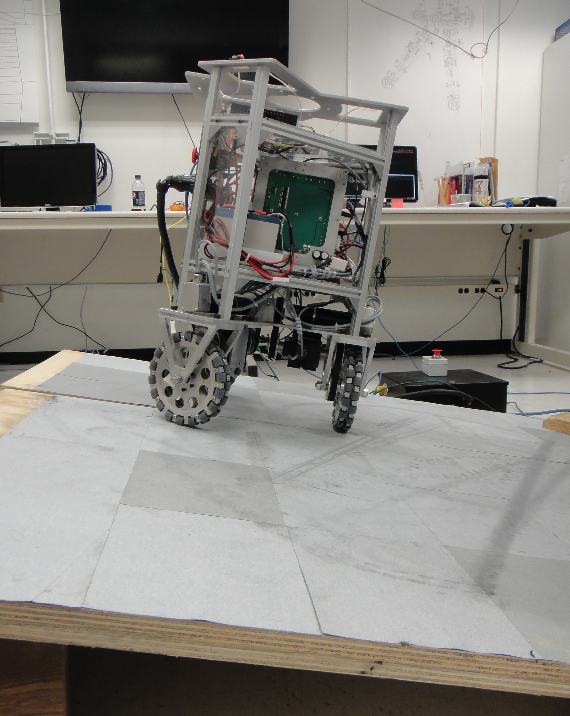
Mobile base
- Holonomic platform
- Torque sensing on all wheels
- Ethercat realtime communications
- Untethered
Meka-UT Austin Dreamer Head
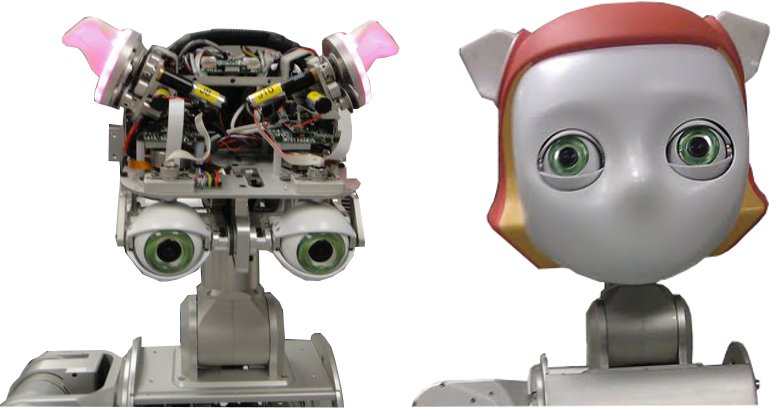
- 4 DOF position controlled neck
- 3 DOF eyes capable of fast Saccade movement
- Stereo cameras on eyes
- Ears rotate and flex to express social gestures
- Ears, change color: pink, blue, white, and green
- Ethercat realtime communication bus