Media from IEEE ARSO 2017 Organized by the HCRL.
https://sites.utexas.edu/arso2017



Title: A Developer’s Primer for Coding Human Behavior in Bots
Abstract: This session demonstrated ways to model human-robot interaction (HRI) using a practical coding scenario. We explored how to program a humanoid robot head that manages its eye contact to maximize “connection” and minimize “social awkwardness” in human interaction. This session addressed practical computational questions and frame cognitive modeling problems based on intuitive mechanical analogies. We leveraged the power of feedback Whole-Body Control to generate useful behaviors – and demonstrated the results on the Dreamer Humanoid robot head!
Participants: Steven Jorgensen, Travis Llado, Orion Campbell, Luis Sentis
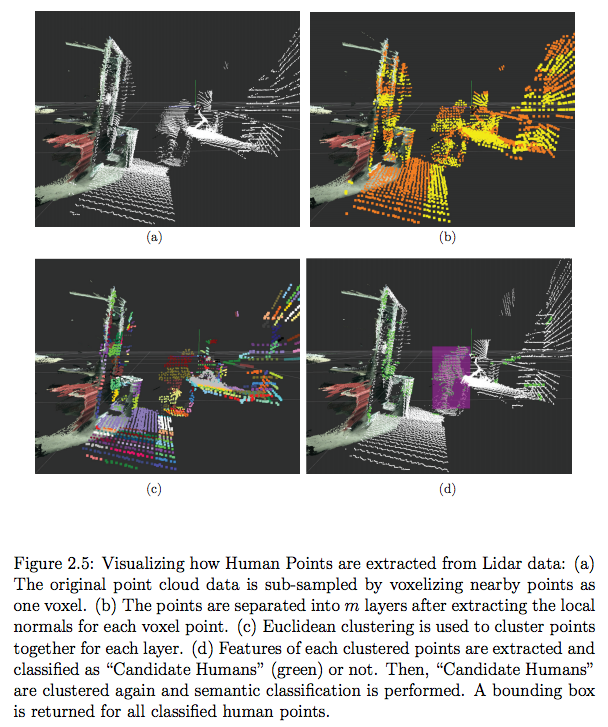
We are very pleased to have the MS Thesis on Human Detection, Gesture Recognition, and Policy Generation for Human-Aware Robots, completed from our own Steven Jorgensen. Congratulations!
We are very pleased to have an all star line up of keynote speakers for the IEEE International Workshop of Advanced Robotics and its Social Impact in Austin, during March 8-10, 2017: (1) Ruzena Bajcsy, Director Emerita of Citrus at the University of California at Berkeley and co-founder of the renown GRASP laboratory at the University of Pennsylvania , (2) Sabine Hauert, Professor of Swarm Robotics at the University of Bristol, TED talk speaker, and expert in science communication, (3) Mady Delvaux, member of the European Parliament and advocate of increasing digital competences in education systems, and (4) Alan Manning, a renowned UK labour economist and professor of the London School of Economics.



You can find the biographies of the speakers on this link.
Additionally, a panel in conjunction with SXSW is scheduled to take place on Friday March 10, 2017.
The HCRL is very pleased to announce the 2nd call for submissions, due on October 7th, for the IEEE International Workshop on Advanced Robotics and its Social Impacts. ARSO is a single track workshop with top scientific and social papers gathering an eclectic mix of researchers, scientists, and thinkers intersecting the area of robotics and autonomous systems from various perspectives. Consider submitting your top research studies addressing significant scientific, computational, and experimental questions in advanced robotics and its broader impacts, including:
Notice that there are various options for submission:
Full papers will published in IEEE Xplore.
URL: https://sites.utexas.edu/arso2017
All the best,
ARSO 2017 Organizing Committee