

Students Compete at RoboCup@Home in Montreal
Snippets of Panel at SXSW on Mobility Beyond Wheelchairs
Compliments to Kwan Suk for his new Paper

Compliments to Rachel and Gray for their new paper

Compliments to Gray for his Paper

The Cloud Shared Laboratory for STEM Education
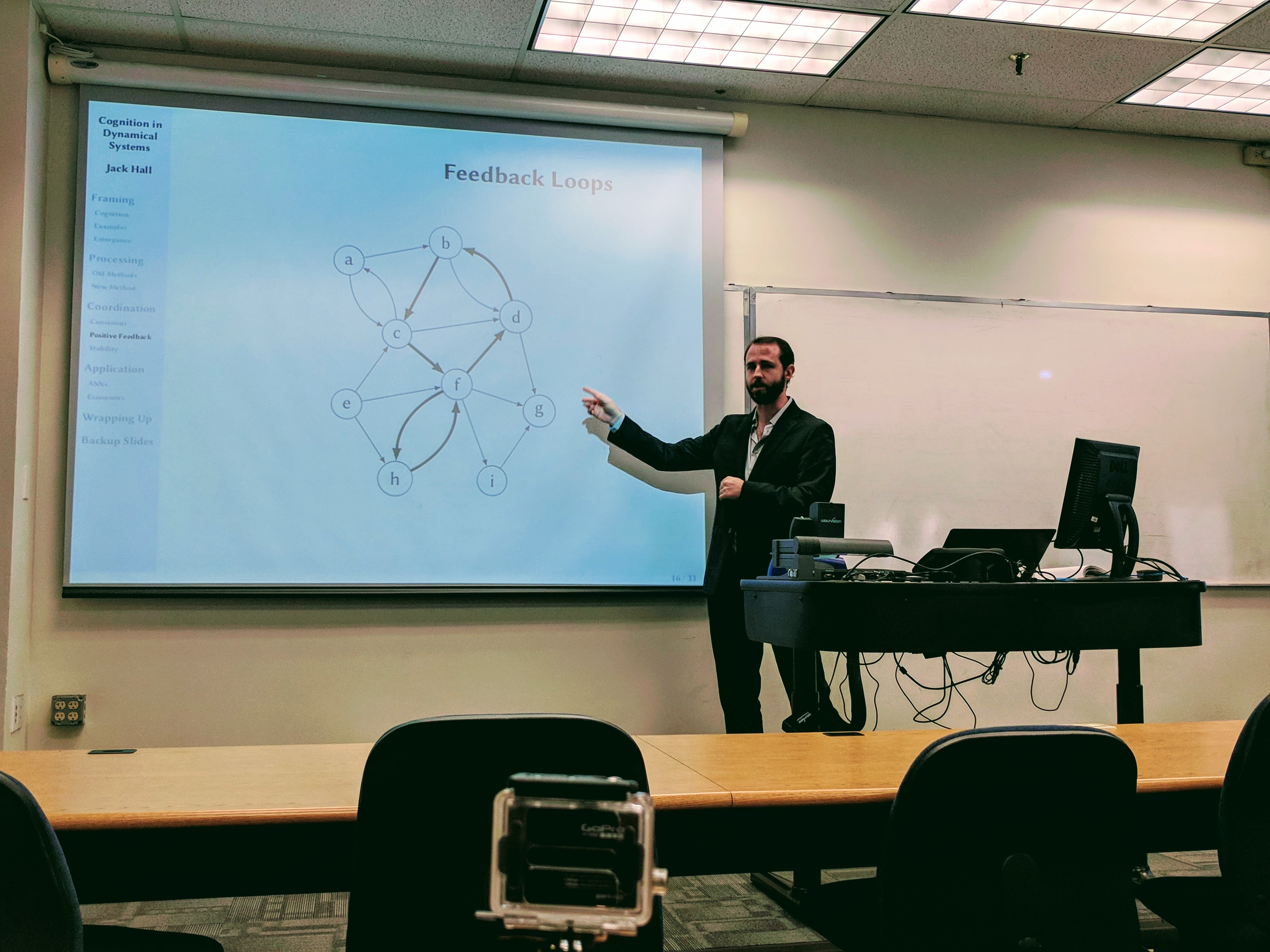
Jack Hall Successfully Defends his PhD Thesis
Donghyun Kim Successfully Defends his PhD Thesis

{kind=link}
PhD Dissertation on Intelligent Collision Management in Dynamic Environments for Human-Centered Robots
This thesis, written by PhD student Kwan Suk Kim posits that no matter how hard we try, collisions will always happen, and therefore we need to confront and study them both during autonomous navigation or dexterous manipulation. Chapter 5 connects to the question of whether “it is okay for robots to stop objects or other robots that are about to run into people?”
Various videos of this dissertation are shown below: