A screw-based affordance template framework enables adaptive robotic execution of complex contact tasks (CCTs) in DOE decontamination and decommissioning (D&D) environments.
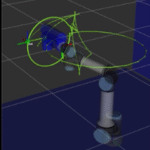
By modeling tasks with screw and wrench primitives, the approach supports real-time reconfiguration, force-adaptive control, and scalable task generalization. A Pre-Planner module refines motion plans by integrating collision constraints and dynamically adjusting trajectories based on real-time Force/Torque (F/T) feedback.
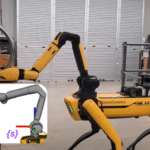
The framework has been validated at the NRG lab and the Hanford site, demonstrating scalability, robustness, and generalization across robotic platforms for challenging nuclear maintenance tasks.