
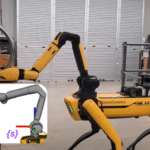
Robots operating in unpredictable environments require versatile, hardware-agnostic frameworks capable of adapting to various tasks. While a recent screw-based affordance approach shows promise, it faces challenges in avoiding undesirable configurations, singularity navigation, and task success prediction. To address these limitations, we propose the Closed-Chain Affordance (CCA) planner – a novel framework that incorporates explicit gripper orientation control and generates complete joint trajectories in real time for screw-based task affordance execution. Our method models the affordance and manipulator as a closed-chain mechanism, introducing an innovative approach to solving closed-chain inverse kinematics. It encapsulates task constraints and simplifies task definitions, while remaining hardware and robot agnostic, robust to errors, and invariant to the initial grasp. We validate our framework with simulations on a UR5 robot and real-world implementation on a Boston Dynamics Spot robot. Our experiments demonstrate rapid joint trajectory generation (0.0077–0.098 s) for various tasks, including a 420° valve turn with gripper orientation control. Comparison with state-of-the-art methods shows a 4x improvement in planning time, reduced joint movement, and achievement of greater task goals.
- Video: https://www.youtube.com/watch?v=Ukv93hbNrOM
- Github:
- Standalone planner: https://github.com/UTNuclearRoboticsPublic/closed-chain-affordance
- ROS2 interface: https://github.com/UTNuclearRoboticsPublic/closed-chain-affordance-ros
- Panthi, Janak, Farshid Alambeigi, and Mitch Pryor. “A Closed-Chain Approach to Generating Affordance Joint Trajectories for Robotic Manipulators.” IEEE Transactions on Robotics (2025). Link
