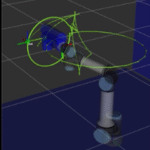
This project extends the Alpha Radiation Survey demo by enabling 3D visualization of radiation.
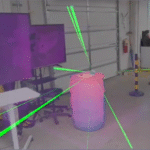
Using AugRE, we represent alpha, beta, and gamma particles through dynamic particle effects. The system incorporates spatial mapping for accurate placement in the environment and mesh generation that reacts dynamically to variations in radiation intensity.
Currently, the system uses simulated data, with ongoing work to integrate real sensor readings from devices such as Compton cameras and alpha flashlight sensors, enabling accurate, real-time 3D visualization of radiation levels.
- UT Austin 2026 Energy Symposium (poster) (presentation)
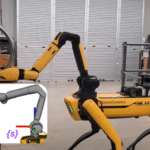
- Video: AR Interface for Human-Robot Radiation Inspection