


This talk took place in October as part of the UT Austin – Portugal annual conference.
Archives for 2020
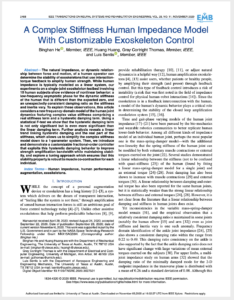
New Paper in IEEE TNSRE Journal
Congratulations to Binghan, Huang and Gray! New research suggests that “hysteretic damping” models of human neuromuscular behavior are more accurate than “mass-spring-damper” models and could improve the performance of strength amplifying exoskeletons. Click the image below to go to IEEE Transactions on Neural Systems and Rehabilitation Engineering.
Ribbon Cutting Ceremony of New Anna Hiss Robotics Building
The HCRL, along with 14 other robotics laboratories on campus participated in the ribbon cutting ceremony of our new robotics building. Among the attendees we had the governor or Texas, the secretary of the Army, the president of the university, and the deans of engineering and natural science. It was a splendid day.
New Autonomous Delivery System (SMADS project)
The HCRL participated in developing an end-to-end autonomous delivery system for the UT campus, capable of bringing food items without human intervention. Here is a pointer to an article in Medium:
https://medium.com/good-systems/robots-in-real-time-c914d1fe2fe2
Best Paper Award from IEEE Transaction on Mechatronics (TMech)

Virtual ICRA presentation and paper by Steven Jorgensen
Virtual presentation and paper on coordinating simultaneous manipulation and locomotion for humanoids and dexterous legged robots.
S. Jorgensen, M. Vedantam, R. Gupta, H. Cappel, and L. Sentis, Finding Locomanipulation Plans Quickly in the Locomotion Constrained Manifold, IEEE International Conference on Robotics and Automation, 2020
https://arxiv.org/pdf/1909.08804.pdf
Video of PhD defense of Steven Jorgensen
Check out our newest paper on autonomous locomotion
Our paper, lead by former student Ye Zhao, PI Luis Sentis, and collaborators, Yinan Li, Ufuk Topcu and Jun Liu, Reactive Task and Motion Planning for Robust Whole-Body Dynamic Locomotion in Constrained Environments, is conditionally accepted to The International Journal of Robotics Research. It describes a symbolic planning and subsymbolic control architecture for humanoid robots to autonomously navigate in complex dynamic environments.

Our control architecture paper has been accepted to IJRR
Our paper, lead by students Donghyun Kim, Steven Jorgensen, Jaemin Lee, Junhyeok Ahn, Jianwen Luo, and PI Luis Sentis, Dynamic Locomotion For Passive-Ankle Biped Robots And Humanoids Using Whole-Body Locomotion Control, is now accepted to The International Journal of Robotics Research. Congratulations to the team! It allows line foot robots such as Mercury and Draco to dynamically walk and recover from push disturbances using Whole-Body Controllers.
