


What a surprise!!! We celebrated the tenure of Luis, the Lab’s Head, as a family, with a warm celebration and acknowledgement of the effort from every single member of the group. The future awaits and in humanoid robotics and human-centered technologies, we are going to be making some news! Cheers!!
Archives for 2015
Hot Science Cool Talks
Dreamer Wishes You Happy Holidays!
Arxiv Preprint of Our Paper on Non-Periodic Dynamic Locomotion.
Presentations during Humanoids 2015 on Stabilizing Point Foot Biped Robots and Data Fusion
Texas Tribune Festival’s Innovation Showcase




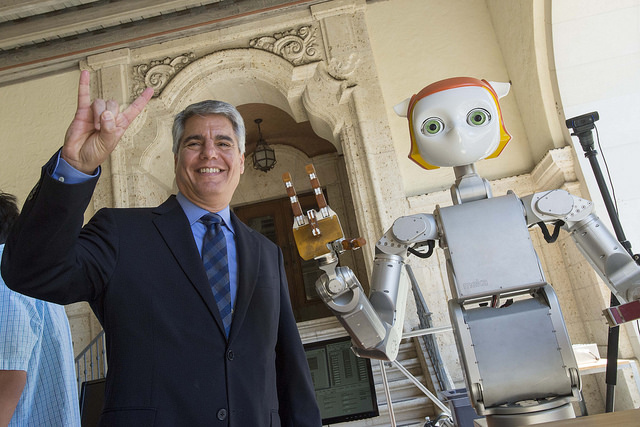
President Greg Fenves and Dreamer
Longhorn’s Innovation Fund for Technology Cloud-Based Advanced Robotics Laboratory Presentation
Undergraduate Students Control Humanoid Robot and Show hardware Creation
Bridget Owens uses the CARL web framework designed by our laboratory to conduct experiments using humanoid robots. CARL allows not only to control humanoid robots but also collect data for motion analysis. Former undergraduate student Travis Llado has created and advanced research platform. In this case, Rocky is used for studies in rough terrain manipulation and is funded by NASA Johnson Space Center.
